| Главная | Скачать | Купить | Студентам | Активация | Документация | Обновление | Игра | Контакты |
|
Новости
Еще... Частые вопросы
 Робот-официант. Разработка Дин-Софт
|
Основы разработки роботов и робототехнических систем для Dyn-Soft RobSim 5Средства разработкиДля разработки моделей для Dyn-Soft RobSim 5 необходимо:
При установке средств разработки Dyn-Soft RobSim 5 в 3D Studio MAX устанавливается специальный плагин, создающий в 3D Studio MAX:
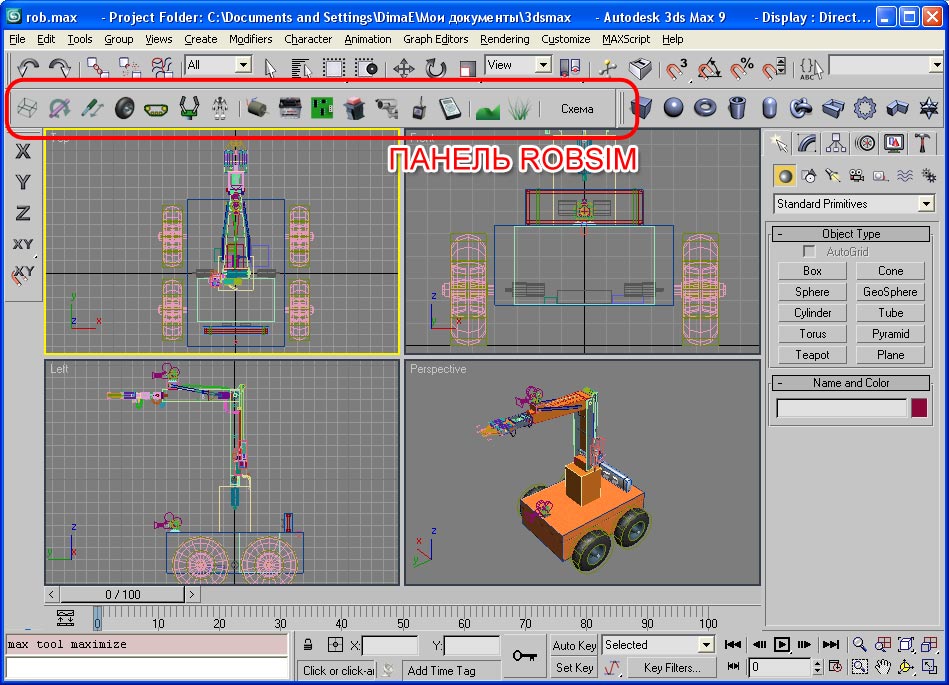
Порядок разработки модели1. Разработка геометрической модели роботаРазработка модели робота для Dyn-Soft RobSim 5 начинается в программном комплексе 3D Studio MAX. При создании модели важно поместить робота в начале координат, ориентировать передом по направлению оси Y (вверх на виде сверху), а также установить его колесами или опорами на поверхность Z=0.
При рисовании робота следует также обратить внимание на единицы измерения. Рекомендуется переключить единицы измерения в 3D Studio MAX на сантиметры (по умолчанию условные единицы, равные 1 дюйму). Используемые на роботе текстуры следует помещать в папку "Tex" программного комплекса Dyn-Soft RobSim 5. Точнее, при разработке модели текстуры могут находиться в любой папке, главное, чтобы потом при запуске процесса моделирования копии текстур оказались в папке "Tex". 2. Разметка роботаС помощью элементов плагина, устанавливаемого в 3D Studio MAX, на роботе размечаются специальные объекты и механизмы. В частности:
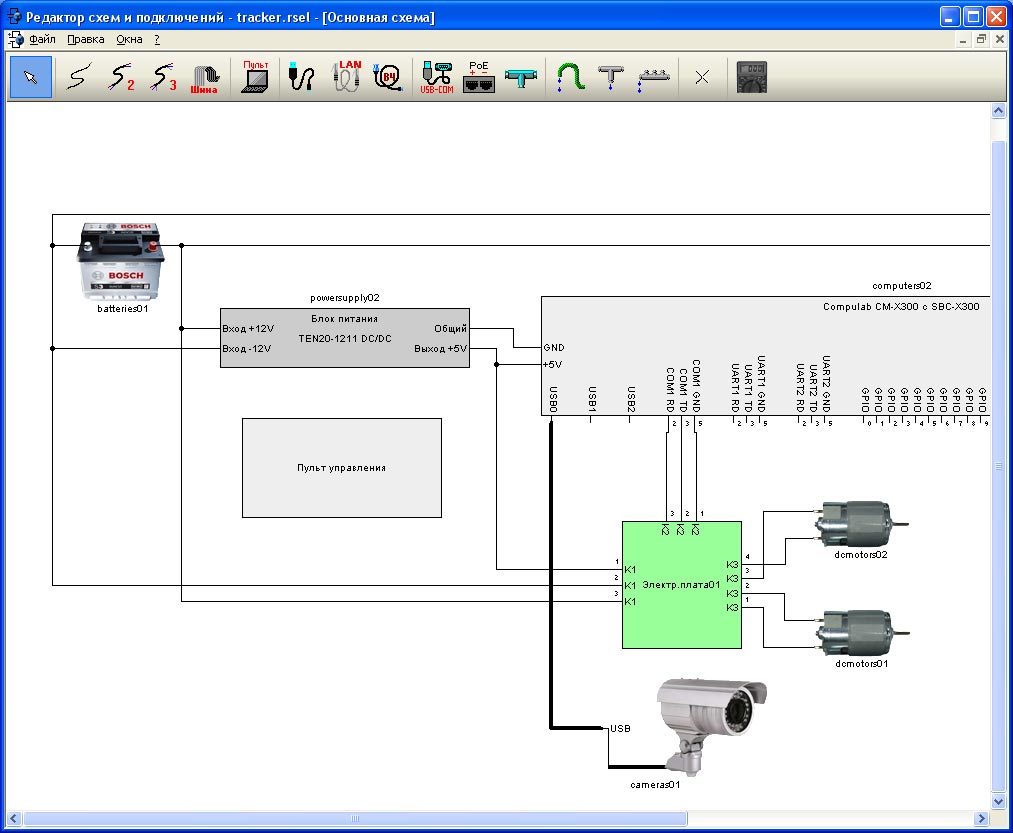
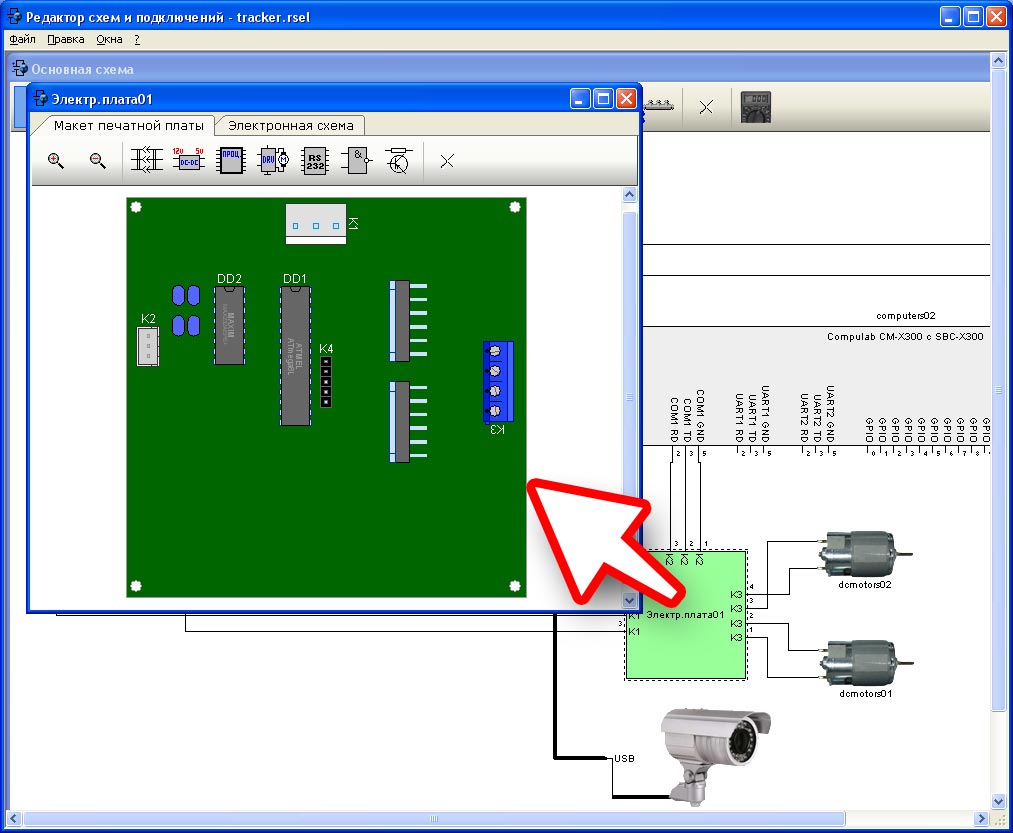
Компоненты робота связываются друг с другом при помощи встроенного механизма привязок 3D Studio MAX. Параметры, задаваемые у поверхностей столкновения (тел), определяют форму, материал и массу звеньев робота. Тела могут быть однородными, полыми или иметь каркас. У колес, осей и линейных звеньев задаются моменты трения и силы трения, при необходимости накладываются ограничения на перемещение и угол поворота, а также указываются двигатели, которые ими управляют. Электронные компоненты создаются из базы данных электронных компонентов. Пользователь выбирает конкретную модель двигателя, аккумулятора, датчика и прочих устройств. Каждое устройство имеет соответствующие габариты и массу, учитываемые программным комплексом Dyn-Soft RobSim 5. 3. Создание электрических схем и подключений.Плагин, устанавливаемый в 3D Studio MAX, позволяет запускать из 3D Studio MAX редактор электрических схем и подключений, передавая ему при запуске состав электронных компонентов, установленных на геометрическую модель робота.
В редакторе каждый такой электрический компонент представлен в виде иконки или схематического изображения, имеющего разъемы и контакты. С помощью редактора электрических схем и подключений пользователь:
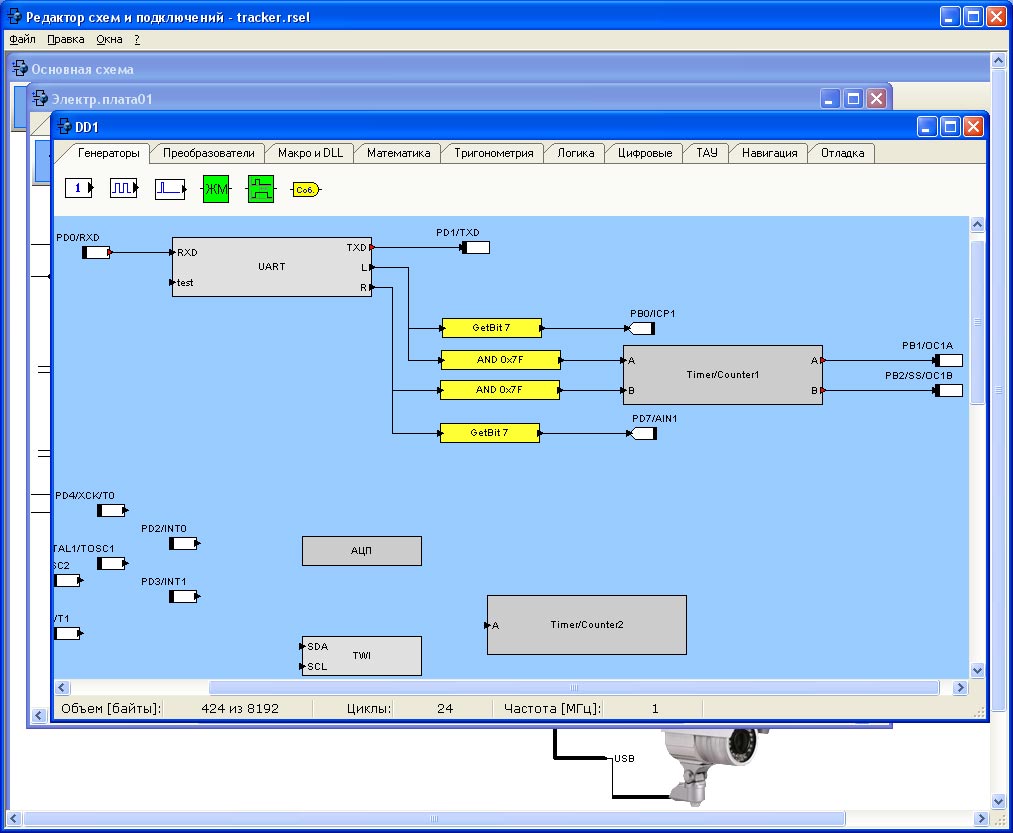
Следует заметить, что для разработки программного обеспечения для моделируемых ЭВМ не требуются навыки программирования. Программное обеспечение создается на базе структурной схемы из набора специальных блоков, связанных между собой (как в MathLAB Simulink).
4. ЭкспортСхема из редактора схем и подключений сохраняется в rsel-файл в папке Robots программного комплекса Dyn-Soft RobSim 5. В ту же папку с помощью плагина экспортируется модель робота из 3D Studio MAX в виде z3d-файла. 5. МоделированиеПосле запуска моделирующего программного комплекса следует выбрать пункт меню «Испытания», выбрать сцену (рекомендуется начать со сцены «Scene1») и разработанного робота. Во время испытания можно с помощью виртуального оператора подойти к роботу, включить или выключить на нем различные органы управления, а также с помощью разработанного пульта управления приводить робота в движение.
|
| Программный комплекс Dyn-Soft RobSim 5. © 2012-2015 г.г. Дин-Софт | Дизайн: Дин-Софт |